I am a postdoctoral research fellow at
ETH Zurich AI Center working with Prof. Dr. Marc Pollefeys.
I am also a visiting researcher with Federico Tombari at Google Zurich.
Before joining ETH Zurich, I finished my Ph.D. in Computer Vision, Machine Learning and 3D Scene Understanding
in the
Computer Vision Group
of
Prof. Dr. Bastian Leibe
at
RWTH Aachen University
and spent some time at Google X in Munich with
Martin Bokeloh
and Google Research Zurich with
Kostas Rematas, as well as Apple in California.
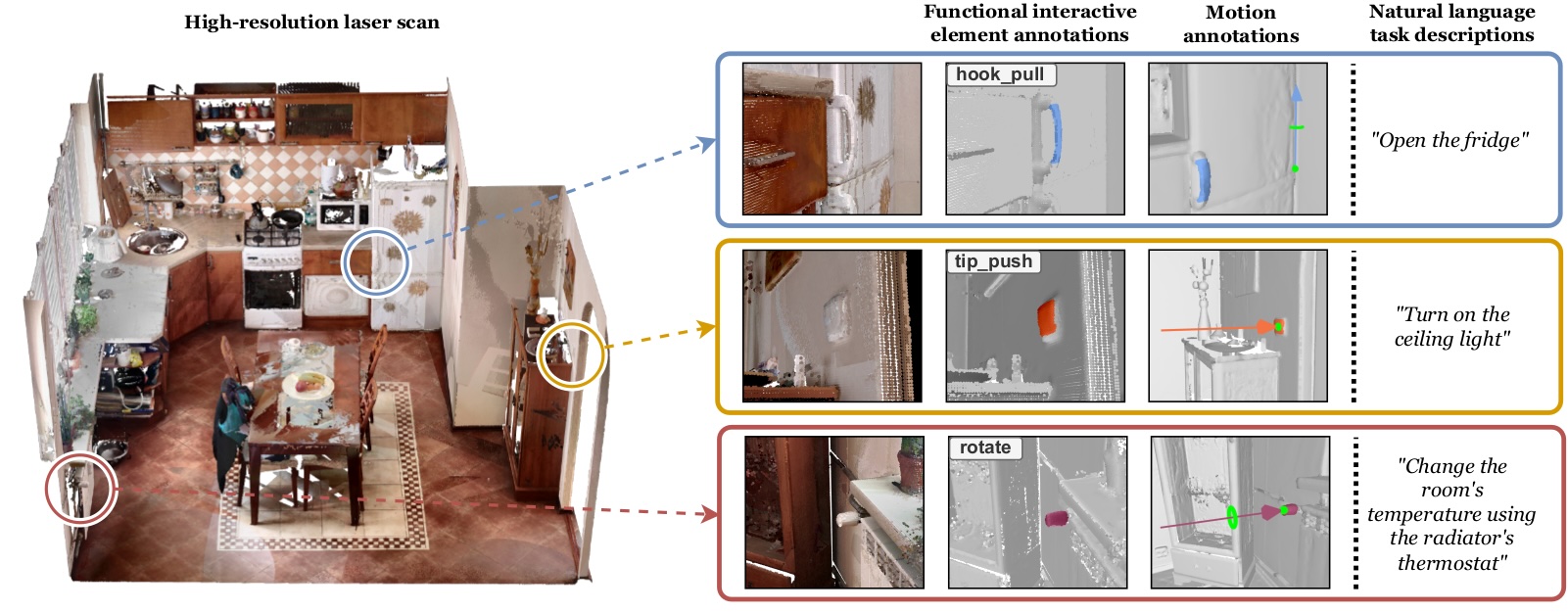
SceneFun3D: Fine-Grained Functionality and Affordance Understanding in 3D Scenes
Proc. Computer Vision and Pattern Recognition (CVPR), 2024.
Paper
BibTeX
Project
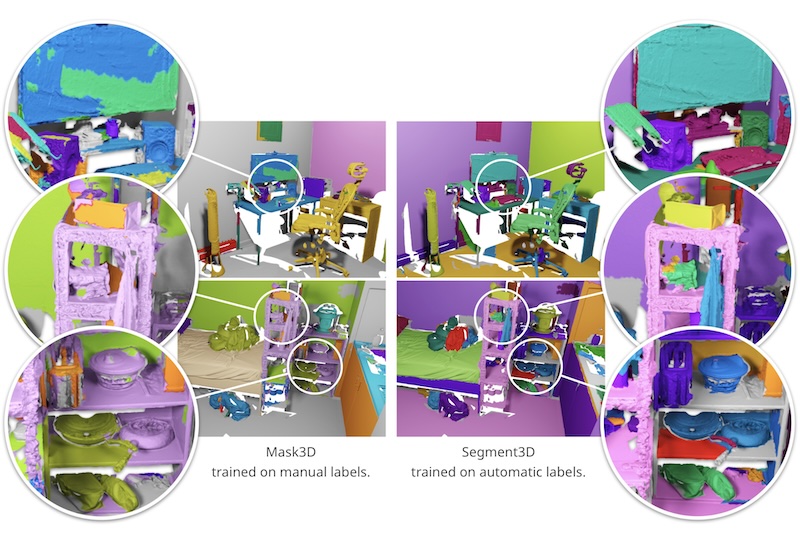
Segment3D: Learning Fine-Grained Class-Agnostic 3D Segmentation without Manual Labels
Paper
BibTeX
Project
Demo
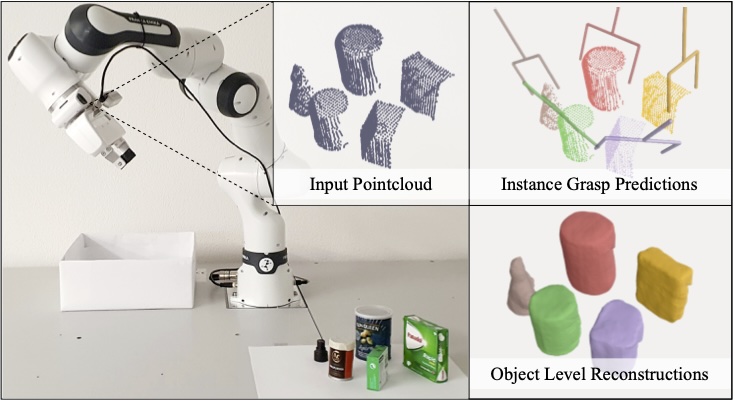
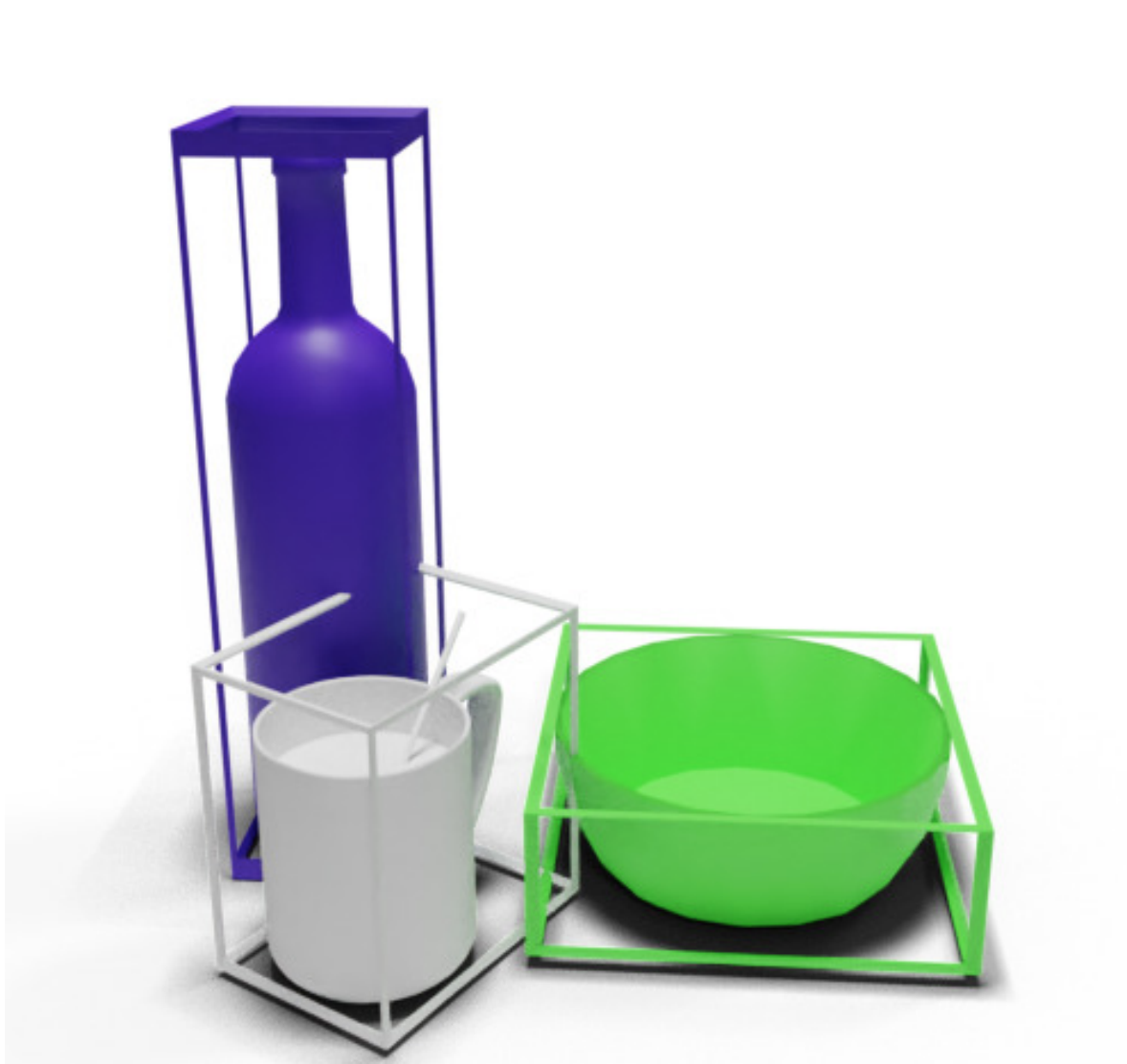
ICGNet: A Unified Approach for Instance-Centric Grasping
Proc. International Conference on Robotics and Automation (ICRA), 2024.
Paper
BibTeX
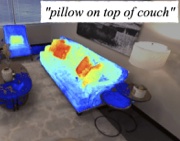
OpenMask3D: Open-Vocabulary 3D Instance Segmentation
Conference on Neural Information Processing Systems (NeurIPS), 2023.
Paper
BibTeX
Project
Code
LabelMaker: Automatic Semantic Label Generation from RGB-D Trajectories
International Conference on 3D Vision (3DV), 2024.
Spotlight
Paper
BibTeX
Project
Code
OpenNeRF: Open-Set 3D Neural Scene Segmentation with Pixel-Wise Features and Rendered Novel Views
International Conference on Learning Representations (ICLR), 2024.
Paper
BibTeX
Project
Code
AGILE3D: Attention Guided Interactive Multi-object 3D Segmentation
International Conference on Learning Representations (ICLR), 2024.
Paper
BibTeX
Project
Code
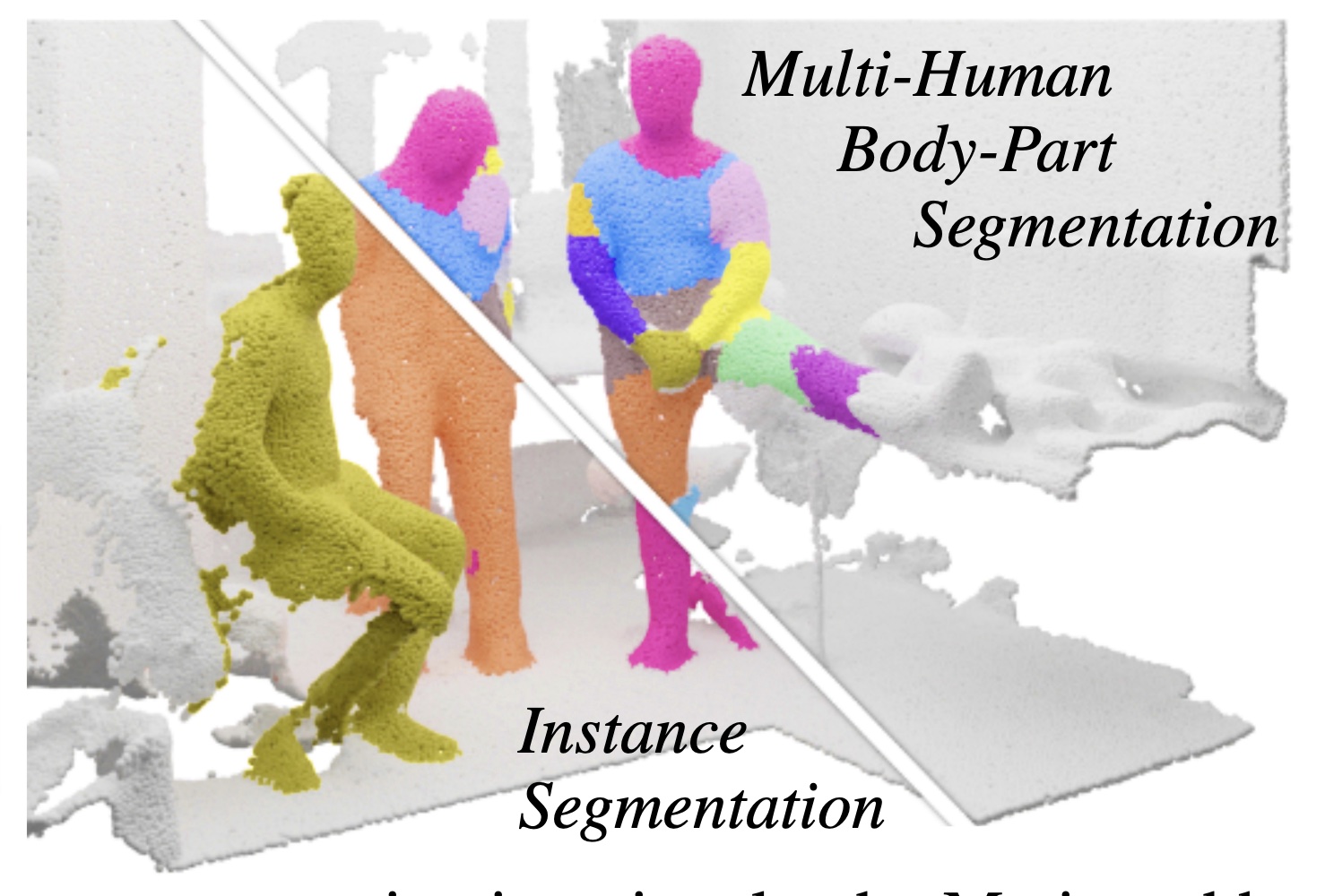
3D Segmentation of Humans in Point Clouds with Synthetic Data
Proc. International Conference on Computer Vision (ICCV), 2023.
Paper
BibTeX
Project
Code
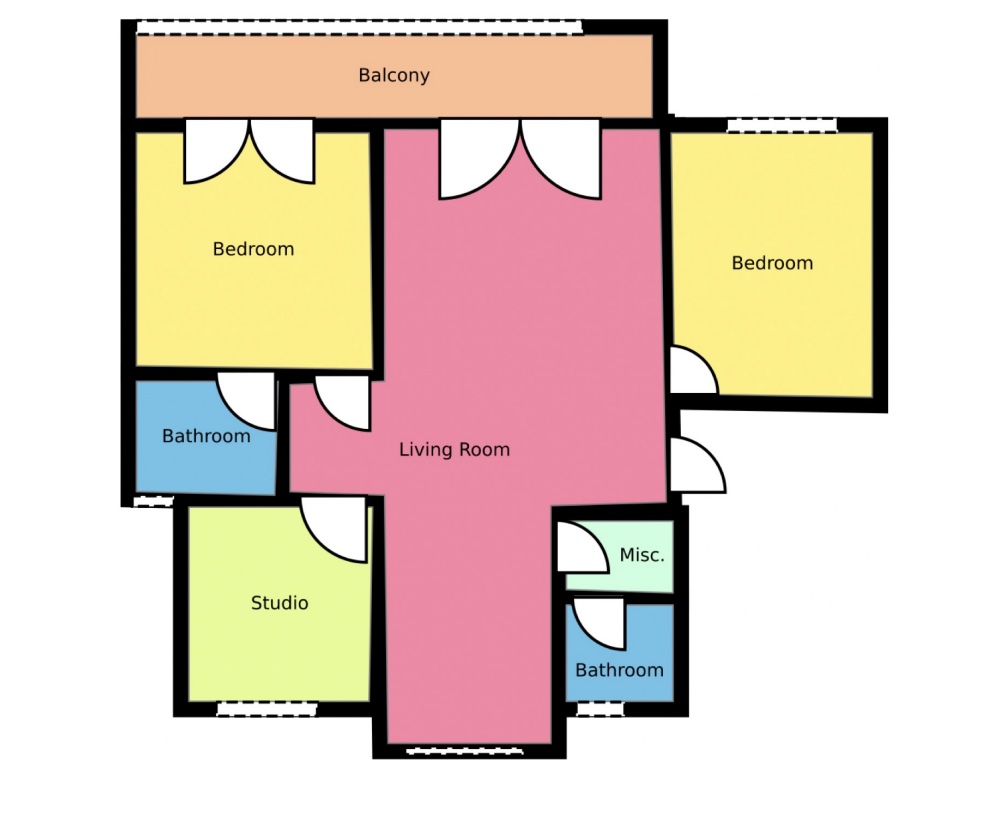
Connecting the Dots: Floorplan Reconstruction Using Two-Level Queries
Proc. Computer Vision and Pattern Recognition (CVPR), 2023.
Paper
BibTeX
Project
Code
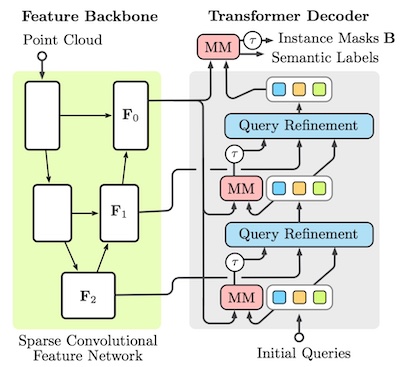
Mask3D: Mask Transformer for 3D Semantic Instance Segmentation
Proc. International Conference on Robotics and Automation (ICRA), 2023.
1st Place ScanNet Challenge
Paper
BibTeX
Project
Code
Demo
Box2Mask: Weakly Supervised 3D Semantic Instance Segmentation Using Bounding Boxes
European Conference on Computer Vision (ECCV), 2022.
Oral Presentation
Paper
BibTeX
Project
Video
Code
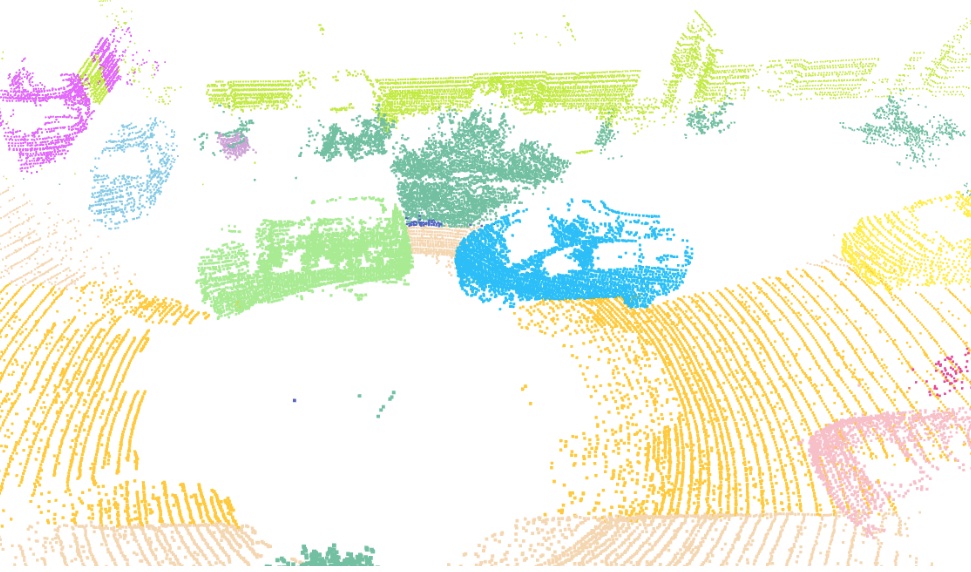
4D-StOP: Panoptic Segmentation of 4D LiDAR using Spatio-temporal Object Proposal Generation and Aggregation
European Conference on Computer Vision Workshops (ECCVW), 2022.
Paper
BibTeX
Code
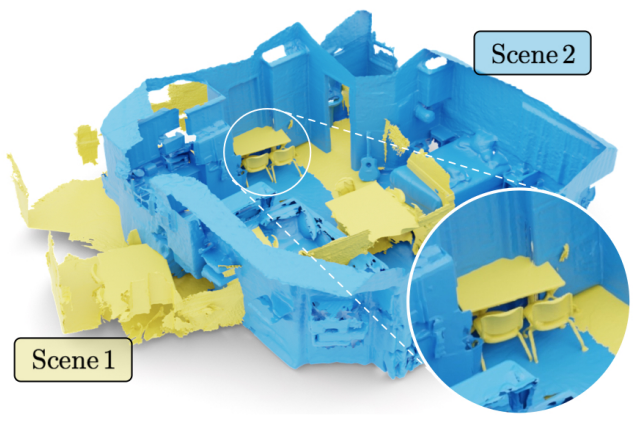
Mix3D: Out-of-Context Data Augmentation for 3D Scenes
International Conference on 3D Vision (3DV), 2021.
Oral Presentation, 1st Place ScanNet Challenge
Paper
BibTeX
Demo
Project
Code
From Points to Multi-Object 3D Reconstruction
Proc. Computer Vision and Pattern Recognition (CVPR), 2021.
Paper
Poster
BibTeX
Project
Code
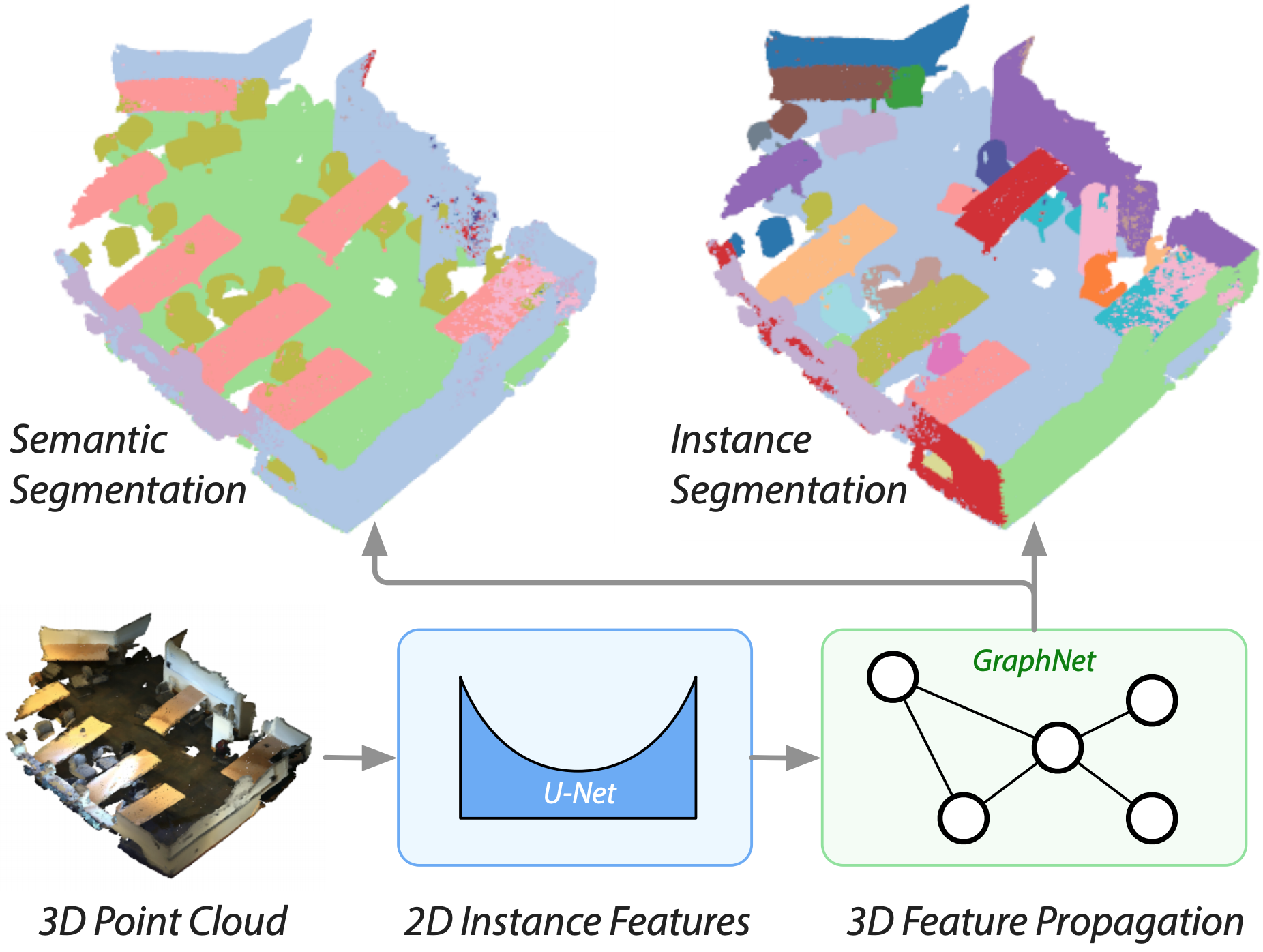
3D-MPA: Multi Proposal Aggregation for 3D Semantic Instance Segmentation
Proc. Computer Vision and Pattern Recognition (CVPR), 2020.
Paper
BibTeX
Project
Video
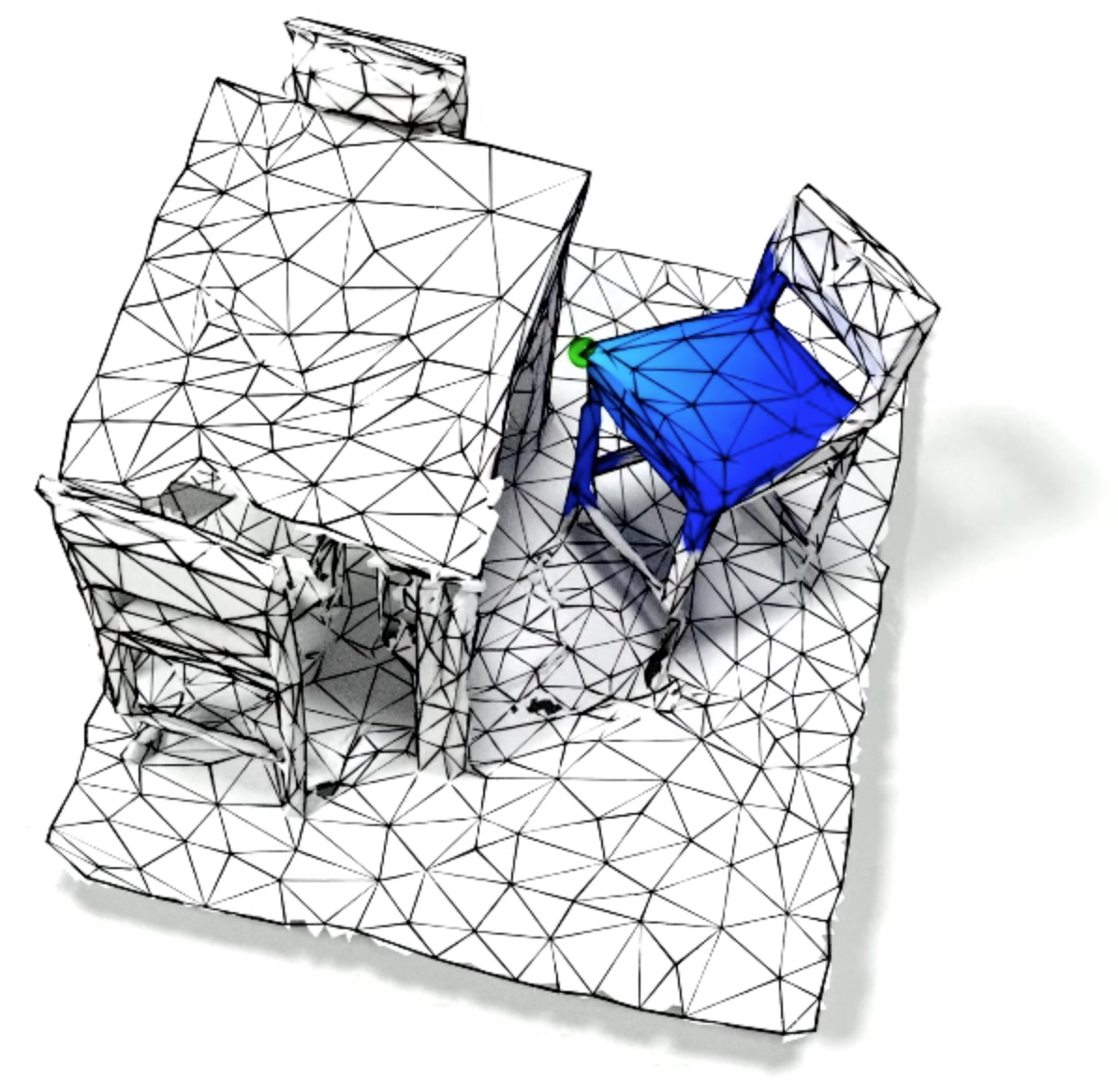
DualConvMesh-Net: Joint Geodesic and Euclidean Convolutions on 3D Meshes
Proc. Computer Vision and Pattern Recognition (CVPR), 2020.
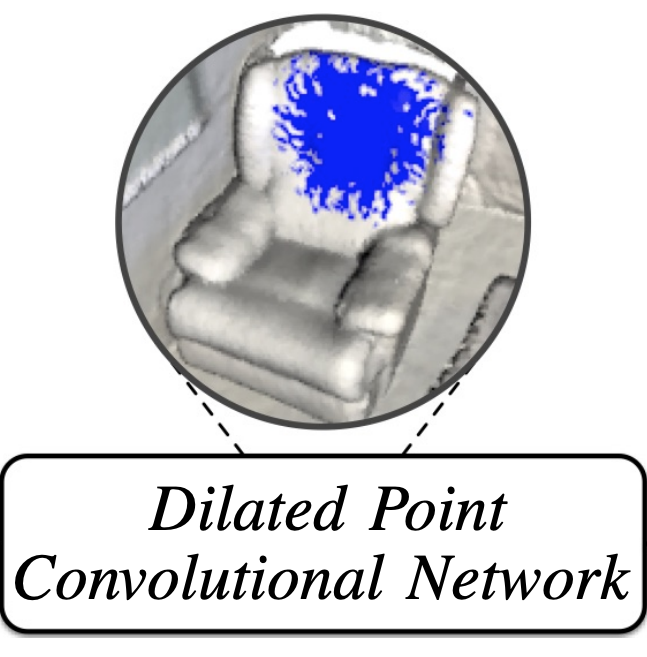
Dilated Point Convolutions: On the Receptive Field Size of Point Convolutions on 3D Point Clouds
Proc. International Conference on Robotics and Automation (ICRA), 2020.
Paper
BibTeX
Poster
Project
Video
3D-BEVIS: Bird’s-Eye-View Instance Segmentation
Proc. German Conference on Pattern and Recognition (GCPR), 2019.
YRF DAGM Best Master's Thesis Award 2019
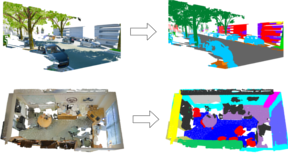
Know What Your Neighbors Do: 3D Semantic Segmentation of Point Clouds
Proc. European Conference on Computer Vision Workshops (ECCVW), 2018.
Paper
BibTeX
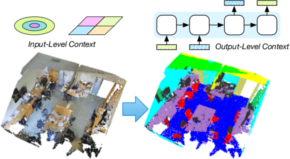
Exploring Spatial Context for 3D Semantic Segmentation of Point Clouds
Proc. Internationcal Conference on Computer Vision Workshops (ICCVW), 2017.
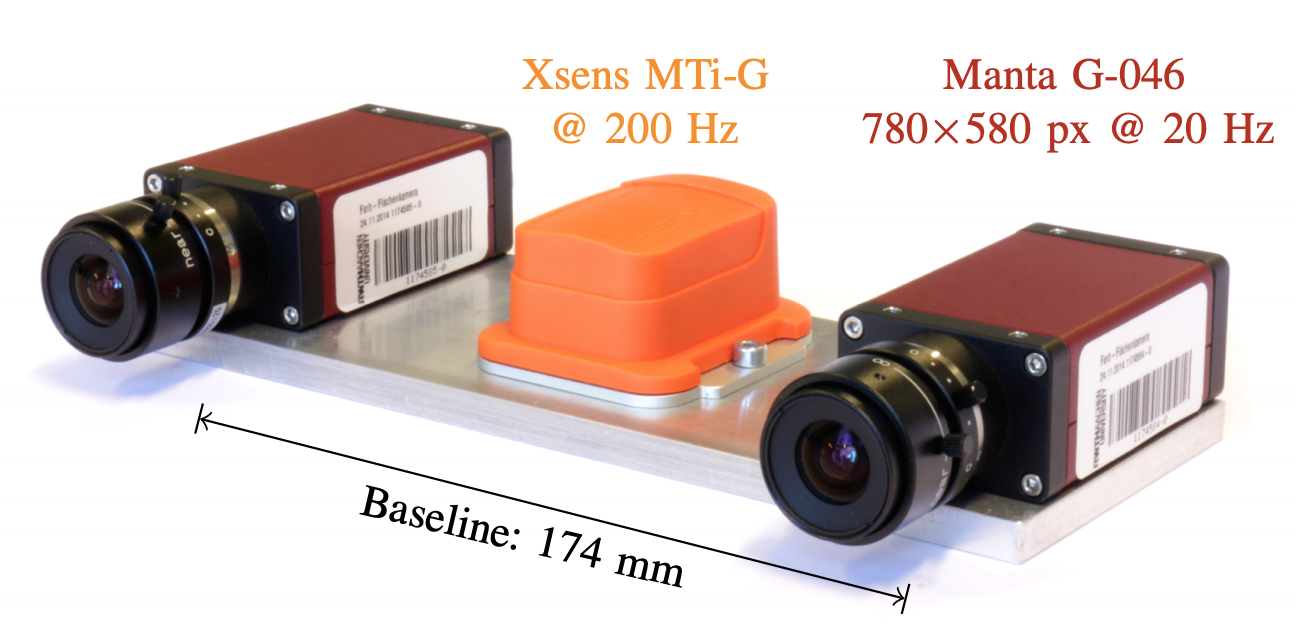
Keyframe-Based Visual-Inertial Online SLAM with Relocalization
Proc. International Conference on Intelligent Robots and Systems (IROS), 2017.
Paper
BibTeX
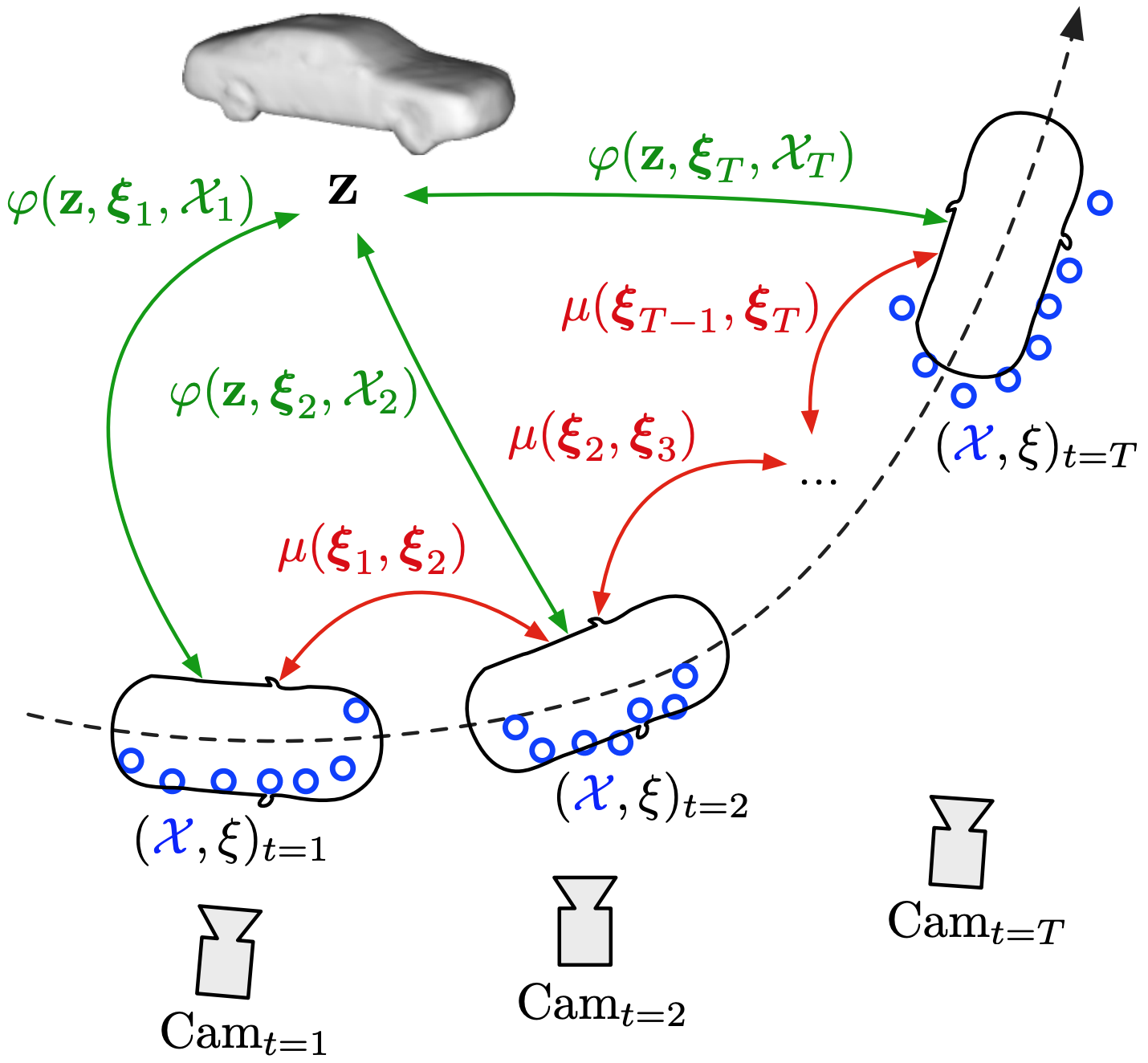
SAMP: Shape and Motion Priors for 4D Vehicle Reconstruction
Proc. Winter Conference on Applications of Computer Vision (WACV), 2017.
Paper
BibTeX
Poster
Supplementary Material
Project
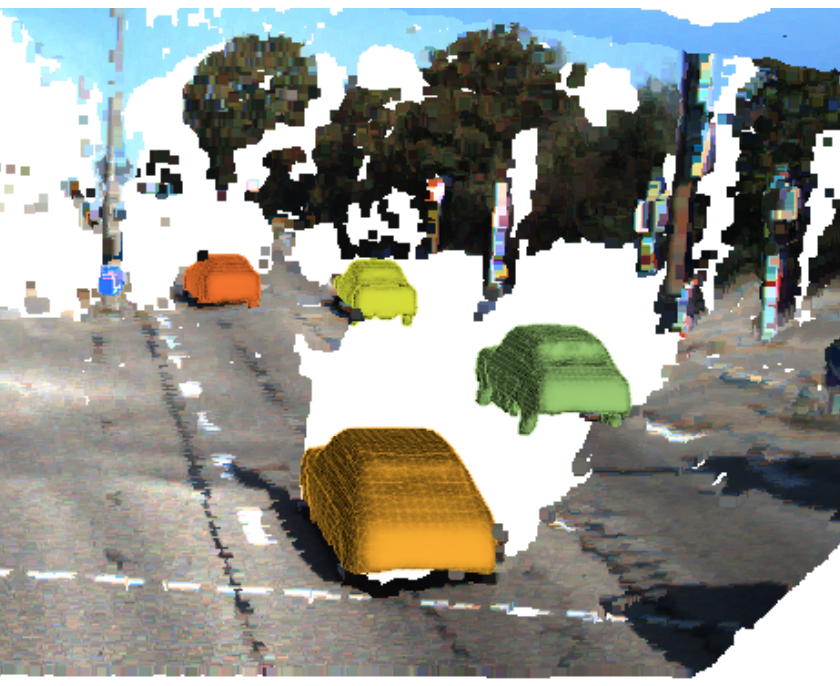
Joint Object Pose Estimation and Shape Reconstruction in Urban Street Scenes Using 3D Shape Priors
Proc. German Conference on Pattern Recognition (GCPR), 2016.
Virtual KITTI 3D: Extension of the Virtual Kitti dataset including 3D cloud representations and refined semantic labels.
Graph Convolutional Nets: Implementation of Kipf et al. graph convolutional networks.
Fast Voxel Traversal: Implementation of the Fast Voxel Traversal algorithm.
Spectrum Analyzer: Some tools to visualize audio input using OpenAL and FFTW.
MCMC-MH: Implementation of MCMC-MH and sudoku solver using MCMC.
Francis Engelmann
News
Previous news
Publications
@inproceedings{delitzas2024scenefun3d,
author = {Alexandros Delitzas and Ayca Takmaz and Federico Tombari and Robert Sumner and Marc Pollefeys and Francis Engelmann},
title = {SceneFun3D: Fine-Grained Functionality and Affordance Understanding in 3D Scenes},
booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2024}
}
@article{Huang2023Segment3D,
author = {Huang, Rui and Peng, Songyou and Takmaz, Ayca and Tombari, Federico and Pollefeys, Marc and Song, Shiji and Huang, Gao and Engelmann, Francis},
title = {Segment3D: Learning Fine-Grained Class-Agnostic 3D Segmentation without Manual Labels},
journal = {arXiv},
year = {2023}
}
@article{zurbrugg2024icgnet,
title = {{ICGNet: A Unified Approach for Instance-Centric Grasping}},
author={Zurbr{\"u}gg, Ren{\'e} and Liu, Yifan and Engelmann, Francis and Kumar, Suryansh and Hutter, Marco and Patil, Vaishakh and Yu, Fisher},
journal = {Internationl Conference on Robotics and Automation (ICRA)},
year = {2024}
}

@inproceedings{Takmaz2023openmask3d,
title = {{OpenMask3D: Open-Vocabulary 3D Instance Segmentation}},
author={Takmaz, Ay{\c{c}}a and Fedele, Elisabetta and Sumner, Robert W and Pollefeys, Marc and Tombari, Federico and Engelmann, Francis},
booktitle = {Conference on Neural Information Processing Systems (NeurIPS)},
year = {2023}
}

@inproceedings{Weder2024labelmaker3d,
title = {{LabelMaker: Automatic Semantic Label Generation from RGB-D Trajectories}},
author={Weder, Silvan and Blum, Hermann and Engelmann, Francis and Pollefeys, Marc},
booktitle = {International Conference on 3D Vision (3DV)},
year = {2024}
}
@inproceedings{engelmann2023opennerf,
title = {{OpenNerf: Open Set 3D Neural Scene Segmentation with Pixel-Wise Features and Rendered Novel Views}},
author={Francis Engelmann, Fabian Manhardt, Michael Niemeyer, Keisuke Tateno, Marc Pollefeys, Federico Tombari},
booktitle = {{International Conference on Learning Representations (ICLR)}},
year = {2024}
}

@inproceedings{yue2023agile3d,
title = {{AGILE3D: Attention Guided Interactive Multi-object 3D Segmentation}},
author = {Yue, Yuanwen and Mahadevan, Sabarinath and Schult, Jonas and Engelmann, Francis and Leibe, Bastian and Schindler, Konrad and Kontogianni, Theodora},
booktitle = {{International Conference on Learning Representations (ICLR)}},
year = {2024}
}
@inproceedings{Takmaz2022human3d,
title = {{3D Segmentation of Humans in Point Clouds with Synthetic Data}},
author = {Ayca Takmaz, Jonas Schult, Irem Kaftan, Cafer Mertcan Akcay, Bastian Leibe, Robert Sumner, Francis Engelmann and Siyu Tang},
booktitle = {{arXiv}},
year = {2022}
}
@inproceedings{Yue2022floorformer,
title = {{Connecting the Dots: Floorplan Reconstruction Using Two-Level Queries}},
author = {Yuanwen Yue, Theodora Kontogianni, Konrad Schindler, Francis Engelmann},
booktitle = {IEEE Computer Vision and Pattern Recognition Conference (CVPR)},
year = {2023}
}
@inproceedings{Schult2022mask3d,
title = {{Mask3D: Mask Transformer for 3D Semantic Instance Segmentation}},
author = {Schult, Jonas and Engelmann, Francis and Hermans, Alexander and Litany, Or and Tang, Siyu and Leibe, Bastian},
booktitle = {Internationl Conference on Robotics and Automation (ICRA)},
year = {2022}
}

@inproceedings{Chibane2022box2mask,
title = {Box2Mask: Weakly Supervised 3D Semantic Instance Segmentation Using Bounding Boxes},
author = {Chibane, Julian and Engelmann, Francis and Tran, Tuan Anh and Pons-Moll, Gerard},
booktitle = {{European Conference on Computer Vision (ECCV)}},
year = {2022}
}
@inproceedings{Kreuzberg22ECCVW,
title = {4D-StOP: Panoptic Segmentation of 4D LiDAR using Spatio-temporal Object Proposal Generation and Aggregation},
author = {Lars Kreuzberg, Idil Esen Zulfikar, Sabarinath Mahadevan, Francis Engelmann, Bastian Leibe},
booktitle = {{European Conference on Computer Vision Workshops (ECCVW)}},
year = {2022}
}
@inproceedings{Nekrasov213DV,
title = {{Mix3D: Out-of-Context Data Augmentation for 3D Scenes}},
author = {Nekrasov, Alexey and Schult, Jonas and Litany, Or and Leibe, Bastian and Engelmann, Francis},
booktitle = {{International Conference on 3D Vision (3DV)}},
year = {2021}
}
@inproceedings{Engelmann21CVPR,
title = {{From Points to Multi-Object 3D Reconstruction}},
author = {Engelmann, Francis and Rematas, Konstantinos and Leibe, Bastian and Ferrari, Vittorio},
booktitle = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}},
year = {2021}
}

@inproceedings{Engelmann20CVPR,
title = {{3D-MPA: Multi Proposal Aggregation for 3D Semantic Instance Segmentation}},
author = {Engelmann, Francis and Bokeloh, Martin and Fathi, Alireza and Leibe, Bastian and Nie{\ss}ner, Matthias},
booktitle = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}},
year = {2020}
}
Oral Presentation
Paper
BibTeX
Project
Code
@inproceedings{Schult20CVPR,
title = {{DualConvMesh-Net: Joint Geodesic and Euclidean Convolutions on 3D Meshes}},
author = {Jonas Schult and Francis Engelmann and Theodora Kontogianni and Bastian Leibe},
booktitle = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}},
year = {2020}
}
@inproceedings{Engelmann20ICRA,
author = {Engelmann, Francis and Kontogianni, Theodora and Leibe, Bastian},
title = {{Dilated Point Convolutions: On the Receptive Field Size of Point Convolutions on 3D Point Clouds}},
booktitle = {{International Conference on Robotics and Automation (ICRA)}},
year = {2020}
}
Paper
BibTeX
@inproceedings{ElichGCPR19,
title = {{3D-BEVIS: Birds-Eye-View Instance Segmentation}},
author = {Elich, Cathrin and Engelmann, Francis and Schult, Jonas and Kontogianni, Theodora and Leibe, Bastian},
booktitle = {{German Conference on Pattern Recognition (GCPR)}},
year = {2019}
}
@inproceedings{Engelmann18ECCVW,
author = {Francis Engelmann and Theodora Kontogianni and Jonas Schult and Bastian Leibe},
title = {Know What Your Neighbors Do: 3D Semantic Segmentation of Point Clouds},
booktitle = {{European Conference on Computer Vision Workshops (ECCVW)}},
year = {2018}
}
Oral Presentation
Paper
BibTeX
Poster
Project
Video
Code
@inproceedings{3dsemseg_ICCVW17,
author = {Francis Engelmann and Theodora Kontogianni and Alexander Hermans and Bastian Leibe},
title = {Exploring Spatial Context for 3D Semantic Segmentation of Point Clouds},
booktitle = {{International Conference on Computer Vision Workshops (ICCVW)},
year = {2017}
}
@inproceedings{Kasyanov17IROS,
title = {{Keyframe-Based Visual-Inertial Online SLAM with Relocalization}},
author = {Anton Kasyanov and Francis Engelmann and J\"org St\"uckler and Bastian Leibe},
booktitle = {{International Conference on Intelligent Robots and Systems (IROS)}},
year = {2017}
}
@inproceedings{Engelmann17WACV,
author = {Francis Engelmann and J{\"{o}}rg St{\"{u}}ckler and Bastian Leibe},
title = {{SAMP: Shape and Motion Priors for 4D Vehicle Reconstruction}},
booktitle = {{Winter Conference on Applications of Computer Vision (WACV)}},
year = {2017}
}
Oral Presentation
Paper
BibTeX
Supplementary Material
Project
Video
Code
@inproceedings{Engelmann16GCPR,
title = {{Joint Object Pose Estimation and Shape Reconstruction in Urban Street Scenes Using 3D Shape Priors}},
author = {Francis Engelmann and J\"org St\"uckler and Bastian Leibe},
booktitle = {{German Conference on Pattern Recognition (GCPR)}},
year = {2016}
}
Projects
 PyViz3D is a simple web-based visualizer for 3D point clouds and other primitives such as meshes, polylines, bounding boxes and labels. It is useful for quick protyping and remote development.
PyViz3D is a simple web-based visualizer for 3D point clouds and other primitives such as meshes, polylines, bounding boxes and labels. It is useful for quick protyping and remote development.
Code
Documentation
Code
Code
Code
Code
Code